

Intelligent Agents in Vehicle Platooning for Smart Cities
Written by D.Jeya Mala and A.Pradeep Reynold
In Smart City applications, there is a tremendous focus on smart transportation. Several industries are working on self-driving cars to solve transportation issues associated with traditional traffic control systems. To its progression, the communication between self-driving cars has become a reality which helps them to form a platoon on a highway to provide an automated driving technology. The vehicles on the road are formed as a platoon in which each vehicle communicates with the other vehicle through V2V technology. In the platoon, the vehicle in the lead drives the speed. The other vehicles line up behind the first vehicle and automatically drive in formation to stay close together on the highway without any traffic congestion. An innovative idea suggested in this article is, the leader and the other vehicles in the platoon to be equipped with intelligent agents to track and communicate the speed of the vehicle to be followed by the other vehicles. In this way, several problems associated with Vehicle Platooning can be reduced.
Vehicle Platooning
Vehicle Platooning [1] proposes that a group of vehicles maintain a proximity while moving as a group. Vehicles are maintained at a short spacing with respect to one another, as well as with respect to their velocity. When drawing the road map, the vehicle in the lead position, which is known as the leader, represents the trajectory and velocity reference. In the platoon, it controls all the following vehicles. In the platoon, every vehicle gets orders from the leader who can either deliver the message directly or pass it on to the next vehicle in the line.
This vehicle platoon helps in effective automated traffic management in terms of reduced time to travel and increased revenue. Additionally, due to the elimination of speed controlling measures done by the human driver, the vehicles that form the platoon are seen as a single entity and the comfort and safety of passengers is improved. Moreover, fuel economy and emission performance both improved. In vehicle platoons, one can see close coordination between vehicles through a headway control mechanism [2].
In early vehicle platoon concepts, the mechanical coupling resembled something like that as in a train. Drive-by-wire steering and throttle, as well as GPS, Bluetooth, and other modern technology all allow computers to take control of cars. 5G communications may assist in making Platooning a safe option due to the increased volume of data to process [4][5].
Intelligent Agents with V2V Technology for Vehicle Platooning
An intelligent agent will generally take decisions based on the information in the knowledge source updated dynamically based on the environmental factors.
Hence, for Platooning automated driving systems, an intelligent agent with vehicle-to-vehicle (V2V) communications technology [3] must be installed in each vehicle to take dynamic decision making and effective communication. This software utilizes the dedicated Short-Range communications to transmit and receive data from one vehicle to another. Essentially, platoon formations reduce traffic congestion, allowing us to travel faster and for longer periods of time. To form a platoon, an onboard computer is required for automated driving systems.
The architecture diagram is given below in figure 1:
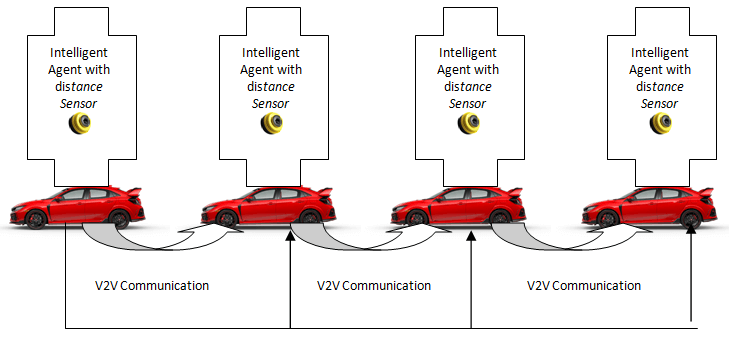
Figure 1 – Vehicle Platooning with Intelligent Agents and V2V technology
The intelligent agent equipped with vehicle-to-vehicle (V2V) communications technology is installed in the on-board computer. The agent then utilizes Dedicated Short-Range Communications to transmit and receive data from one car to another. Vehicles that have an intelligent agent with V2V technology can exchange information with each other at a speed much faster than previously possible. Traffic congestion could be reduced by connecting vehicles via communication technologies such as Vehicle-To-Vehicle (V2V) and vehicle-to-infrastructure (V2I) using the intelligent agent. This can make things better for people who travel by vehicle by getting better traffic management.
Advantages of Intelligent Agents in Vehicle Platooning in Smart Cities
The increased capacity of roads and smoother traffic flow are both provided by a reduction in aerodynamic flow. Fuel efficiency is improved because the vehicles "draught" one another and all vehicles are moving together, with traffic lights included. A reverse concertina effect occurs when human drivers, who follow the vehicles in front of them, see other vehicles ahead and move out of the way, resulting in another vehicle getting trapped behind them.
The earlier vehicles in the platoon had a driver to serve as a “leader” or "guardian angel" for each of the others, but eventually, autonomous vehicles can serve as guardians for groups of vehicles travelling on a highway, without requiring a driver to sacrifice their personal liberty for the greater good. Further, accidents could possibly be reduced due to this guardian or leader vehicle equipped with sensor technology.
Downsides of Vehicle Platooning Without Intelligent Agents
In the instance of a lane change, a long platoon will have the ability to prevent other vehicles from changing lanes unless they are aware of the intentions of other drivers, for example, checking a turn signal or indicator. The platoon will need to acquire a new mentality in which they have full control and travel very closely together.
It is impossible to make every computer system completely secure and it's possible for groups to hack into the system which thus requires a human driver to be present in each vehicle. Also, the self-driving car which use the programming logic to drive comfortably should also be reliable.
A vehicle platoon in a built-up area may not work if the lead vehicle crosses a junction because the junction cannot accommodate all other vehicles in the platoon, which would thus block the junction. Since vehicle platoons would be too dangerous near railway level crossings, they must be avoided if possible. To stop and check that it is safe to go, every vehicle must stop at stop signs.
Intelligent Agent Integration to Tackle Problems in Vehicle Platooning
The Intelligent Agents based Automated highways System (IA2HS) can help to resolve some of the problem. In this innovation, the Platooning cars can go down a lane on their own based on the decisions provided by the intelligent agents. Several platoons of up to 25 vehicles, each with embedded sensors in the road, can use the technology embedded with AI in the form of intelligent agents.
The IA2HS can embed information in the roadway to provide vehicles with traffic signs and hints about their optimal speed. Although modern radar and camera technology has now become good enough for vehicles to interpret 3D data and use this in conjunction with traffic reports to determine a proper speed, older radar and camera technology will remain to be used on smaller vehicles. As the existing solution of Automated Highways System (AHS) which requires the digging up of the roads to put the technology or the construction of new roads with the technology is also extraordinarily expensive, the proposed IA2HS solution that has an Intelligent Agent software in the onboard computer system in the vehicle can reduce the physical costs as discussed above.
Conclusion
The article highlights the application of Intelligent Agents in autonomous vehicles to form vehicle platooning in automated highways. The proposed solution greatly reduces the physical problems in installing cameras on the road to monitor and control Highway traffic systems. The V2V communication used by the Intelligent Agents shall reduce the hassles in adjusting the speed of each of the car and to drive in safer distance. Hence, the intelligent agents embedded in the onboard computer system of the vehicles shall rule the vehicle platooning technology in the future.
References
- Faten Fakhfakh, Mohamed Tounsi, Mohamed Mosbah, Vehicle Platooning Systems: Review, Classification and Validation Strategies, International Journal of Networked and Distributed Computing, Volume 8, No. 4, pp.203-213,2020
- Senlei Wang, Goncalo Homem de Almeida Correia, Hai Xiang Lin, Effects of Coordinated Formation of Vehicle Platooning in a Fleet of Shared Automated Vehicles: An Agent-based model,Transportation, Research Procedia Volume 47, 2020, Pages 377-384,2020
- Carl Bergenhem, Erik Hedin, Daniel Skarin, Vehicle-to-Vehicle Communication for a Platooning System, Procedia - Social and Behavioral Sciences, Volume 48, 2012, Pages 1222-1233, 2012
- US Department of Transportation, Volvo Center Report, How an Automated Car Platoon Works, https://www.volpe.dot.gov/news/how-automated-car-platoon-works
- Darren Cottingham, What is Vehicle Platooning, https://www.drivingtests.co.nz/resources/what-is-vehicle-platooning/
This article was edited by Sara Paiva
For a downloadable copy of the October 2021 eNewsletter which includes this article, please visit the IEEE Smart Cities Resource Center.


To have the eNewsletter delivered monthly to your inbox, join the IEEE Smart Cities Community.
Past Issues
To view archived articles, and issues, which deliver rich insight into the forces shaping the future of the smart cities. Older eNewsletter can be found here. To download full issues, visit the publications section of the IEEE Smart Cities Resource Center.
IEEE Smart Cities Newsletter Editors

Managing Editor
Assistant Managing Editor
IEEE Smart Cities Publications Editorial Board
Luis M. Fernandez-Ramirez
Bernard Fong
Sergii Kushch
Prasad Enjeti
Rabie Ramadan
Ramkumar Lakshminarayanan
Francesco Flammini
Fateh Krim
Maria Pia Fanti
Kristina Kunert
Vladimir Orlic
Asif Ali Ahmed R
Werbeston Oliveira
Emilio Ghiani
Shafi Khadem
Nikumani Choudhury
Mohammad Zeyad
S.M. Masum Ahmed
Payman Dehghanian
Sona N Thadevus
Kumaresan Natarajan
Lues Felipe Gaitan Cubides
Chao Shen
Balaji Sankarshanan
Chun Sing Lai
Zhang Wei
Shashikant Patil
Sai Munikoti
Akhil Jabbar Meerja
Click here for more info
Loi Lei Lai
Editor-in-Chief
IEEE Smart Cities eNewsletter